
Domingo | 2 de julho, 2023
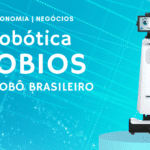
Lançado recentemente ele é um verdadeiro Transformer, capaz de alterar sua forma e assumir oito tipos diferentes de movimentos eficazes para se deslocar, depois de avaliar autonomamente o ambiente.
Apelidado de M4 (Multi-Modal Mobility Morphobot), o novo robô pode rolar sobre quatro rodas, transformar suas rodas em rotores e voar, ficar sobre duas rodas como um suricato para espiar por cima de obstáculos, “andar” usando suas rodas como pés, usar dois rotores para ajudá-lo a subir encostas íngremes em duas rodas, tombar e muito mais.
Aplicações
“Um robô com um conjunto tão amplo de recursos teria aplicações que vão desde o transporte de pessoas feridas para um hospital até a exploração de outros planetas”, diz Mory Gharib (Ph.D. ‘83), professor do Hans W. Liepmann de Aeronáutica e Engenharia Bioinspirada e diretor do Centro de Sistemas e Tecnologias Autônomas (CAST) da Caltech, onde o robô foi desenvolvido.
O M4 é uma criação de Gharib e Alireza Ramezani, professor assistente de engenharia elétrica e de computação na Northeastern University. Um artigo anunciando o novo robô foi publicado na Nature Communications em 27 de junho. “Nosso objetivo era ultrapassar os limites da locomoção de robôs projetando um sistema que apresenta capacidades extraordinárias de mobilidade com uma ampla gama de modos de locomoção distintos. O projeto M4 alcançou esses objetivos com sucesso”, diz Ramezani, autor correspondente do artigo da Nature Communications.
Transformer
A flexibilidade de movimento do robô, aliada à inteligência artificial, permite que ele escolha qual forma de locomoção será mais eficaz com base no terreno à sua frente. Imagine o M4 explorando um ambiente desconhecido: ele pode começar rolando sobre quatro rodas, que é seu modo de maior eficiência energética. Ao atingir um obstáculo como uma pedra, ele poderia ficar sobre duas rodas para espiar por cima dela em busca de uma imagem mais clara do terreno à frente. Então, se visse uma ravina ou outra característica que um robô com rodas não pudesse atravessar, poderia reconfigurar suas rodas em rotores, voar sobre a ravina para o outro lado e continuar rolando.
“Ao encontrar ambientes desconhecidos, apenas os robôs que têm a capacidade de reaproveitar seus componentes multimodais auxiliados pela inteligência artificial podem ter sucesso”, diz Gharib, coautor do artigo da Nature Communications.
Bioinspiração
O design do M4 foi fortemente influenciado pela natureza: Gharib e seus colegas foram inspirados em como os pássaros chukar (um tipo de perdiz) usam o bater de suas asas para dar-lhes força ao correr em declives íngremes, por exemplo, e como os leões marinhos usam suas nadadeiras para diferentes tipos de locomoção no mar e na terra. Embora tais exemplos de reaproveitamento de apêndices do reino animal tenham sido relatados anteriormente por biólogos, os conceitos que eles ilustram só agora estão sendo explorados no domínio da engenharia.
O M4 foi equipado com recursos autônomos e pode tomar decisões por conta própria sobre a melhor forma de navegar em um ambiente complexo. O robô também foi testado ao ar livre e navegou no terreno do campus da Caltech.
Fonte: Instituto de Tecnologia da Califórnia
Destaque – Robô bioinspirado. Crédito: California Institute of Technology